
用意 するもの

- プラカップ(2
個 ) 毛糸
- はさみ
- セロハンテープ
油性 ペン空 のペットボトル
ロボットアームの作 り方
[1]
毛糸を約15cmに切る。これを3本用意する。


[2]
プラカップを半分に切り、飲み口側の半分をもう1つのプラカップに重ねる。
※はさみを使うときは手を切らないように注意する


[3]
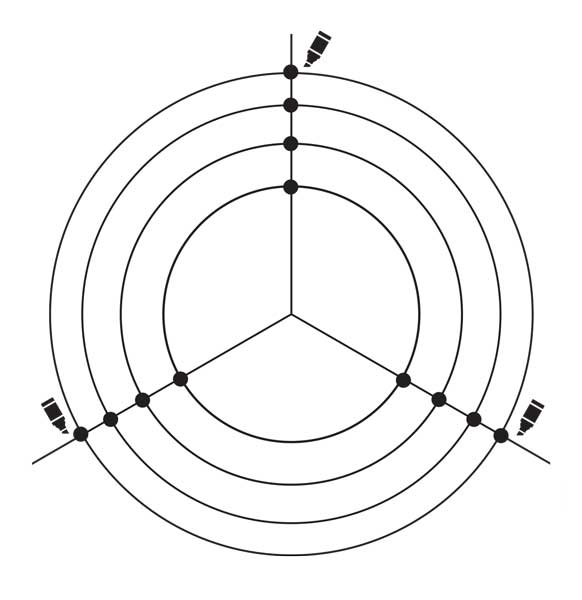
プラカップの口のまわりに、油性ペンで間隔が同じになるように3か所印をつける。「印をつけるための図」をダウンロードして印刷し、その上にプラカップを置くと、簡単に印をつける場所がわかるよ。

[4]
内側と外側のプラカップの印をつけた部分に、セロハンテープで毛糸の両端をとめる。

完成 !

実験 しよう
[1]
外側のプラカップを手でおさえ、もう片方の手で内側のプラカップを回すと、毛糸の輪を開いたり閉じたりできる。輪が閉じたときに毛糸がたるむときは、毛糸の両端を少しずつ引っ張って、ピンと張るように調整しよう。


[2]
輪が開いた状態で空のペットボトルの上から装置をかぶせ、内側のプラカップを回して輪を閉じる。すると、ペットボトルの”首”の部分をつかめる。そのままそっと持ち上げてみよう!

空 のペットボトル以外 のモノを持 ち上 げてみよう
「持ち上げるモノ」は自分でつくることもできるよ。まずは、タピオカストローのような太いストローの両端にそれぞれ3か所切れこみを入れ、外側に折り曲げる。そして、ストローの片方の端にピンポン玉、もう一方の端に持ち上げたいもの(重すぎないもの)をセロハンテープで固定すれば完成! ロボットアームで持ち上げてみよう。


発展 :巨大 ロボットアームをつくろう
プラカップの代わりにラッピングボックスなどの大きな容器を、毛糸の代わりに太めのロープなどを使えば、大きなロボットアームをつくれる。口が大きくなれば、より太いものをつかめるぞ!
※より重いものがつかめるわけではないよ

ポイント
ロボットアームの装置が大きくなると、回すのが難しくなる。だから、内側の容器の底部分と外側の容器の横部分にプラカップなどの「持ち手」をつけよう!


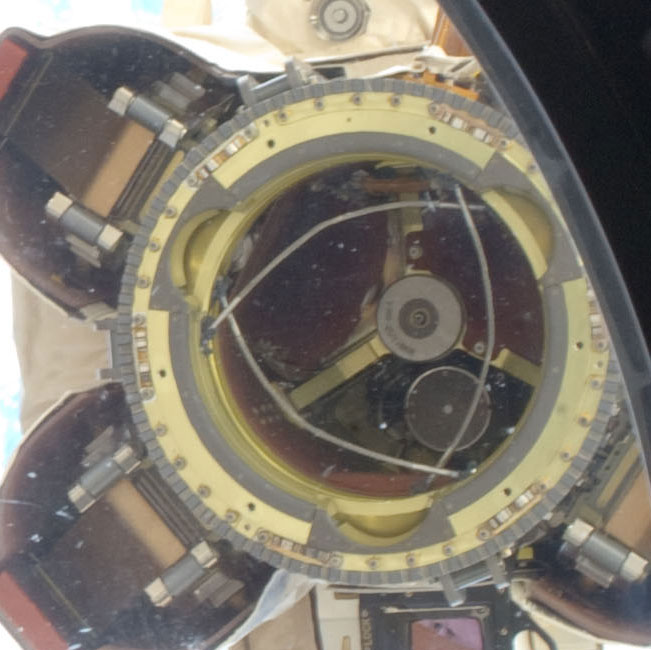
なぜ どうして?:国際 宇宙 ステーションではなぜこのしくみを採用 しているの?
地球から遠く離れた宇宙では、壊れたときの修理が大変。だから、部品の数が少なくてすみ、しかも無重量状態でモノをしっかりつかめるこのしくみが採用されているんだ。
注意
・実験は、必ずおうちの人といっしょにしよう。
・実験前にこの作り方とヒント、注意をしっかり読んで、まちがった手順で行わないようにしよう。
・実験に使う材料は、おうちの人に用意してもらうこと。
・実験のあとは、おうちの人といっしょにあとかたづけをして、小さい子どもの手がとどかないところにしまうこと。
監修:秀明大学/大山光晴
この内容は、「JAXA YAC〜宇宙へつなぐ〜活動教材集「宇宙でものがつかめるかな? -ロボットアーム-」日本宇宙少年団 苫小牧分団 細川正直」を参考にしました。


