
宇宙の実験室、国際宇宙ステーション(ISS)についているロボットアームは、無重力の宇宙空間で、実験装置や補給船などをつかんで運ぶのに使われている。そのロボットアームのつかむ部分「ロボットハンド」を紙コップとたこ糸で作って、そのつかむしくみをさぐってみよう!
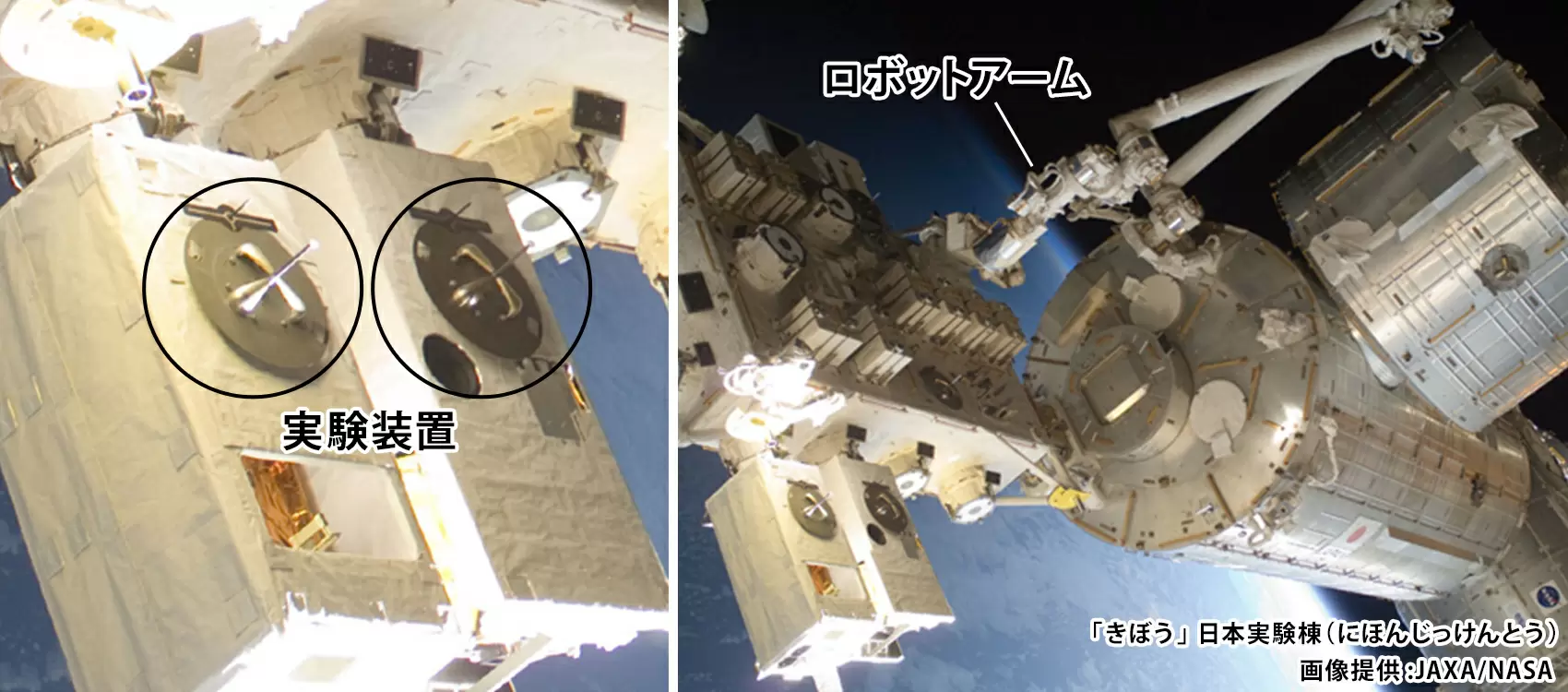
ロボットアームは、実験装置についている細長いぼうを、ロボットハンドでつかんで運ぶよ。
用意 するもの
紙 コップ(口 の直径 が7cmくらいのもの)2つ- たこ
糸 (14cm)3本 - セロハンテープ
- フェルトペン
- はさみ
作 り方
1
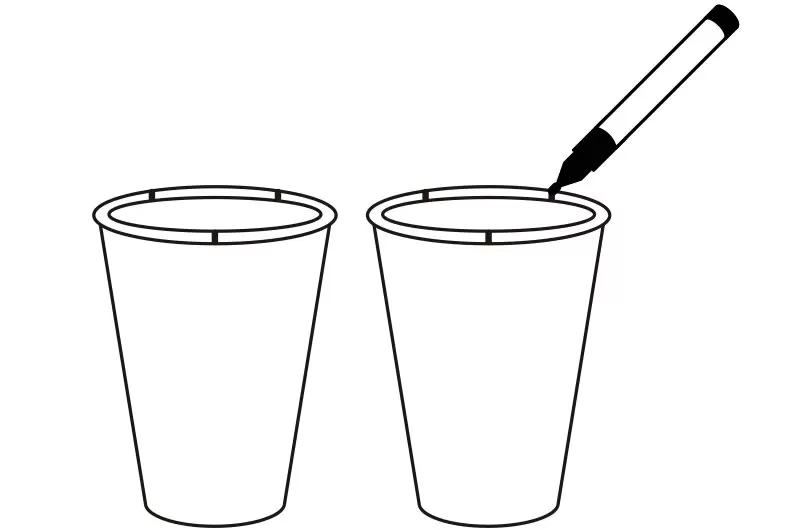
両方の紙コップの口の部分に、同じ間かくになるように3か所にしるしをつける。
2
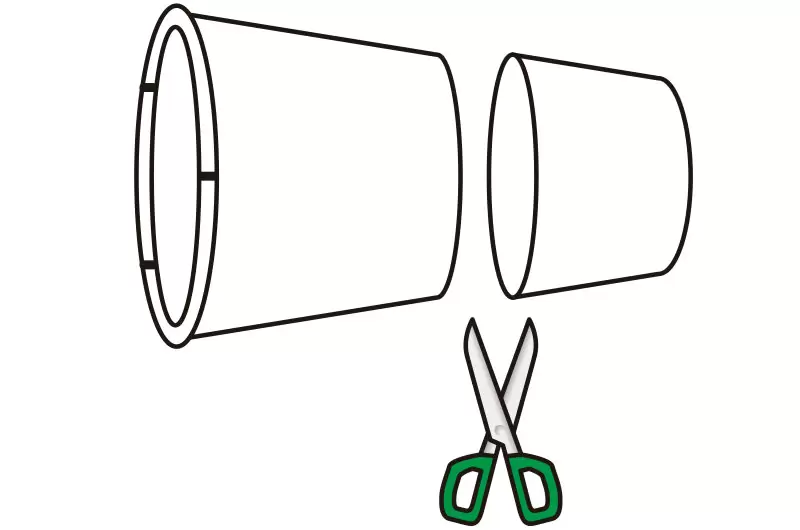
一方の紙コップの底の方をはさみで切りおとす。
3
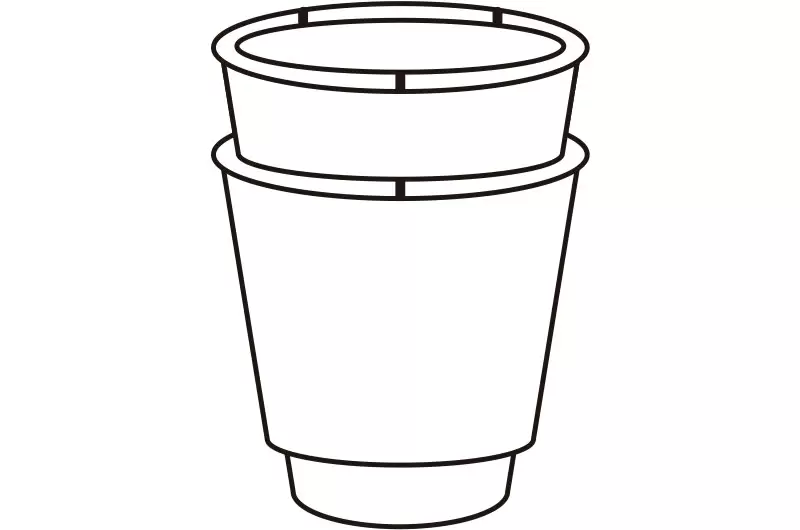
底を切った紙コップを、もう一方の紙コップに重ねる。
4
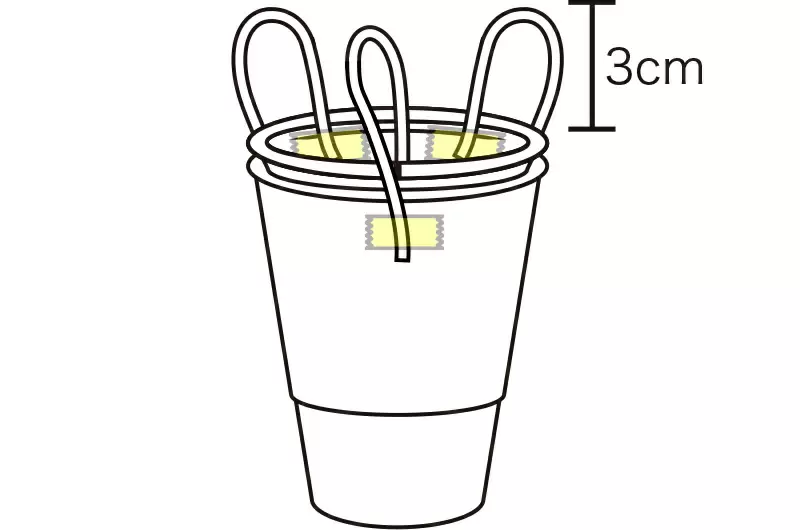
紙コップの口の3カ所のしるしを合わせて、図のようにたこ糸が上に3cmくらい出るようにして、たこ糸の端を、底を切った紙コップには外がわ、もう一方の紙コップには内がわにセロハンテープではる。
5
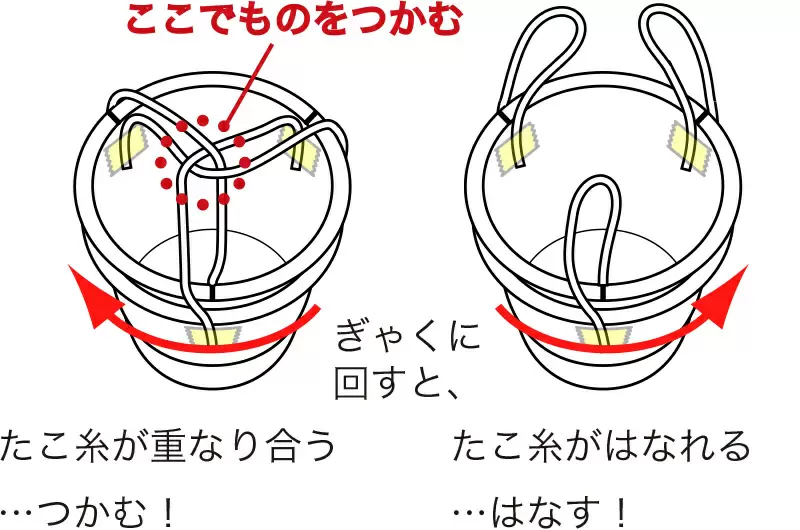
図のように、底を切った紙コップをおさえて、もう一方の紙コップを回すと…
ミッションにチャレンジ
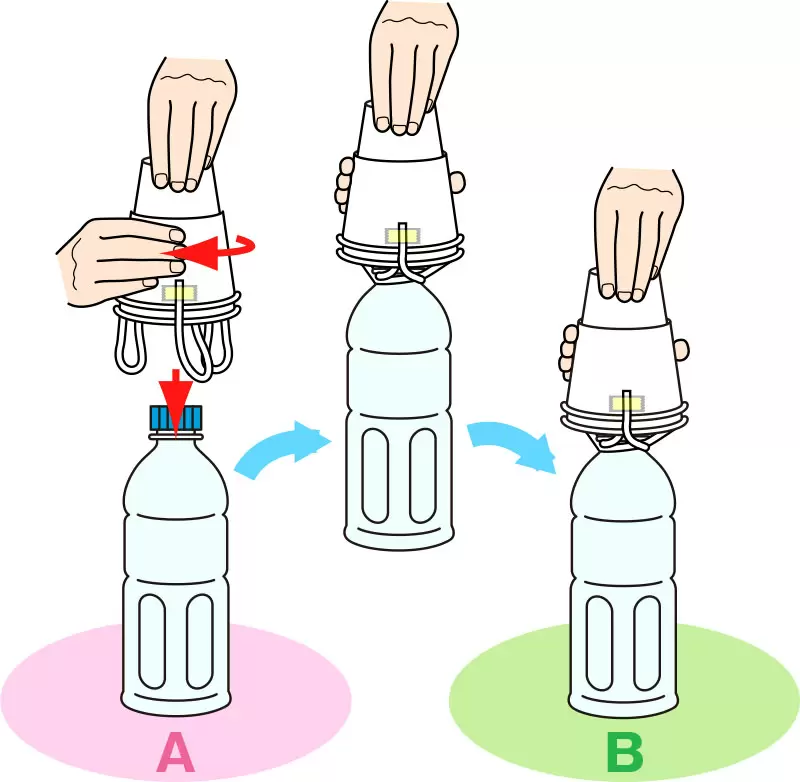
空のペットボトル(500mL用)など、いろいろなものをロボットハンドでつかんで運んでみよう!
ISSのロボットハンドのようす
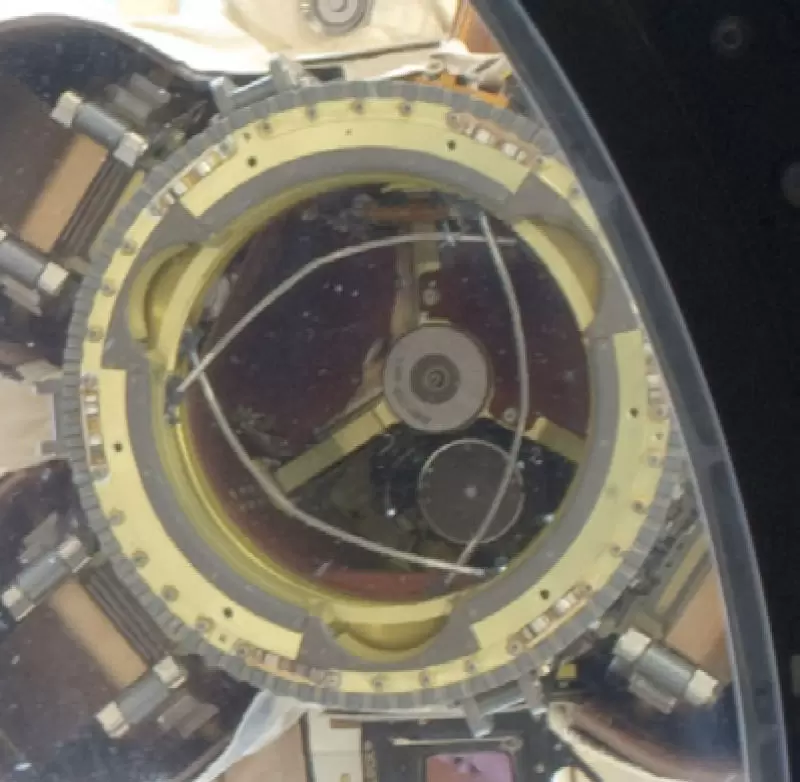
宇宙では、機械がこわれてもかんたんに直すことができない。だから、ISSのロボットアームはかんたんなしくみでできているんだ。また、宇宙は無重力だから、重い実験装置でも、ゆっくり動かしていけば、3本のワイヤーでもしっかりつかんで運ぶことができるんだ。
画像提供:JAXA/NASA
まとめ方
「まとめ方のコツ 工作の例」を見てみよう
注意
- はさみを
使 うときは、けがをしないように気 をつけよう。
工作 をするときの注意
工作 をする前 に必 ずおうちの方 といっしょに読 んでね。
工作 に使 う材料 や道具 などは、使 ってよいものかどうか、おうちの人 に確 かめよう。- はさみやカッターナイフを
使 うときは、けがをしないように気 をつけよう。 - つまようじやフォーク、シャープペンシルのしん、おしピンなど、
先 のとがったものを使 うときは、けがをしないように気 をつけよう。 工作 ・フリーアートを始 める前 には、まわりをかたづけよう。よごれたりぬれたりするおそれがある場合 は、新聞紙 やビニールシートをしこう。- カッターナイフを
使 うときは、下 にカッターマットや厚紙 などをしいて、つくえやゆかをきずつけないようにしよう。 作業 が終 わったら材料 や道具 をきちんとかたづけ、作業 をしていた場所 をきれいにしよう。工作 で使 ったものや作 った作品 は、小 さい子 の手 のとどかない場所 にしまうこと。作業 が終 わったら、必 ず手 をよくあらうこと。接着 ざいは、目的 に合 ったものを使 おう。
教材提供:日本宇宙少年団苫小牧分団細川正直









